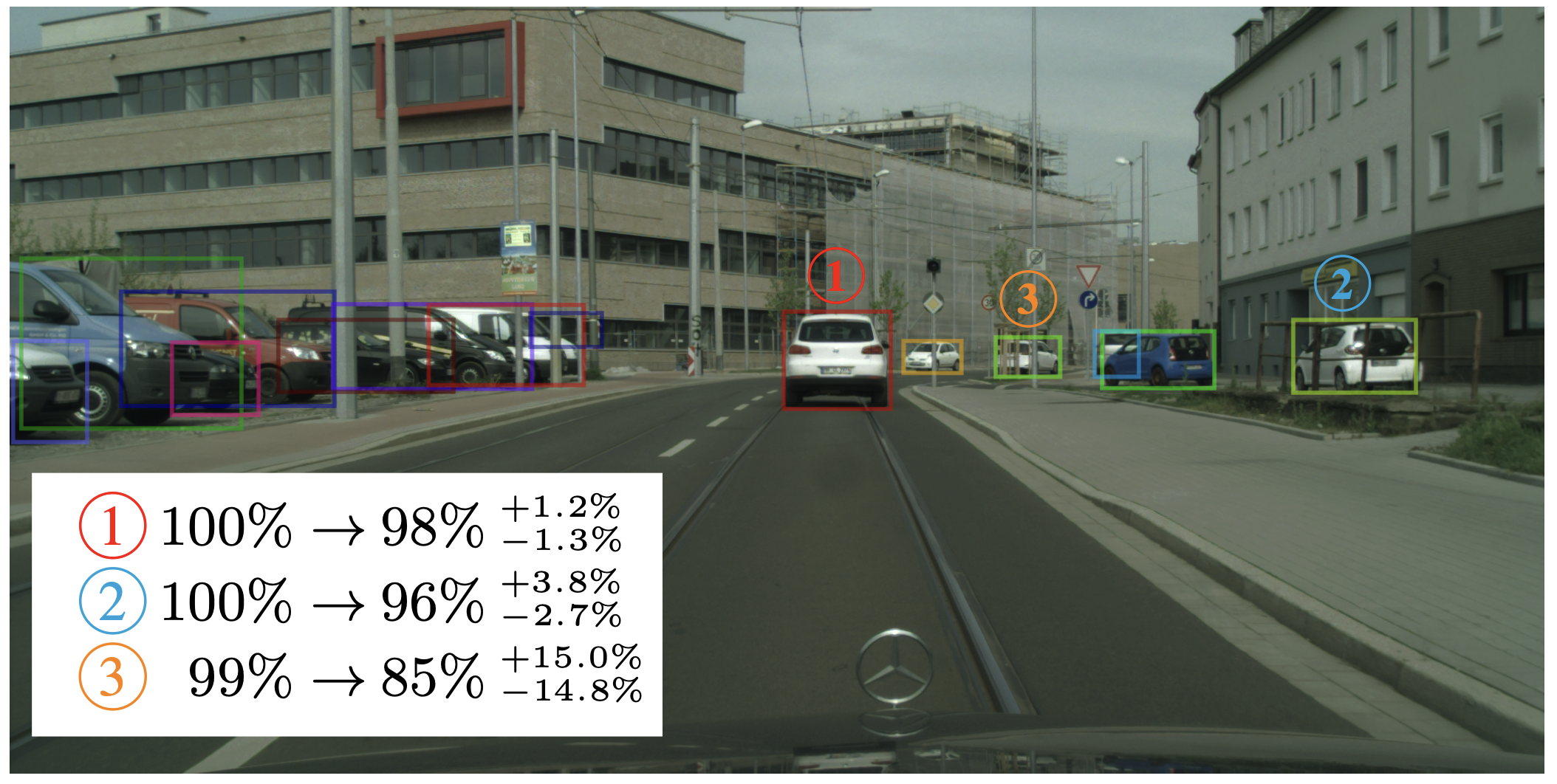
Using stochastic variational inference (SVI), we are able to obtain not only a single calibrated estimate but also an additional prediction interval quantifying the epistemic uncertainty within the calibration mapping. We use a position-dependent calibration framework, but place distributions over the calibration parameters to infer a sample distribution for a single prediction.
